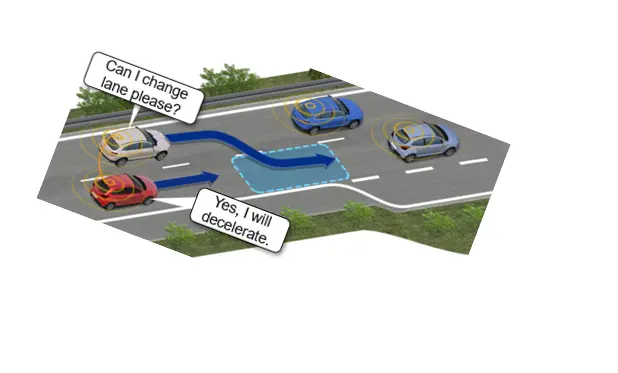
Durch die Weiterentwicklung drahtloser Kommunikationssysteme in den letzten Jahren stehen Technologien zur Verfügung, die durch ihren Einsatz die Fahrzeugsicherheit und Verkehrseffizienz nachhaltig verbessern können. Während das Projekt KOALA in der ersten Phase des Schwerpunktprogramms 1835 der DFG hauptsächlich auf die Verkürzung der durch das Kommunikationssystem generierten Latenz sowie auf die Latenzmodellierung zielte, adressiert das Folgeprojekt KOALA2 die Nutzung dieser niedriglatenten Kommunikation für die Fahrzeugautomatisierung in einem ganzheitlichen Ansatz. Für die szenariobasierte Manöver-koordinierung zwischen Fahrzeugen in kooperativen Use Cases (wie Fahrstreifenwechsel, Pulkfahren/Platooning und Notlenkung) werden Entwurfsmuster für die Kommunikation entwickelt. Dazu wird die derzeitige Broadcast-basierte Informationsverbreitung um die Kommunikation in Gruppen von Fahrzeugen erweitert, die ausschließlich die Akteure des jeweiligen Manövers umfassen. Die entwickelten Verfahren werden prototypisch implementiert und experimentell validiert. Das Vorhaben verbessert nachhaltig die kooperative Manöver- und Trajektorienplanung als Schlüsseltechnologien für sicherheitsrelevante Use Cases im kooperativen automatisierten Fahren.
Forschungsprofessuren
Forschungsprofessuren der Fakultät Informatik

Software Engineering, Verteilte Anwendungen und Ingenieurmathematik
Christian.Facchi@thi.de


Human Machine Interface and Virtual Reality
Andreas.Riener@thi.de

Forschungsbereiche und -schwerpunkte
KOALA2 - Kooperativ interagierende Automobile mit geringer Kommunikationslatenz Prof. Dr. Facchi
Fahrzeuge hacken: Projekt HATS3 Prof. Dr. Hans-Joachim Hof

Verunfallte oder brennende Hybrid- und Elektrofahrzeuge erfahren eine besondere Aufmerksamkeit in der Medienlandschaft. Dies führt zu einer Verunsicherung der Kaufinteressenten und folglich zu einem Vertrauensverlust in die Technologie. Fahrzeugunfälle oder -brände werden unter anderem durch systemseitige Fehlfunktionen hervorgerufen. Speziell die große Menge an komplexer Software führt zwangsläufig zu Fehlern im System, die unter Umständen eine Sicherheitslücke darstellen und so zu Verwundbarkeiten führen, welche böswillige Angreifer ausnutzen können um die Software zu manipulieren. Damit wird zum einen die Funktionalität eines Steuergeräts wie beispielsweise des Batteriemanagementsystems beeinträchtigt und zum anderen kann das Steuergerät als Basis für weitere Angriffe benutzt werden. Die Folgen sind nicht nur Imageschäden der Elektromobilität und Rückrufaktionen, sondern auch potentielle Schäden an Menschen und Umwelt. Die genannten Szenarien werden aktuell durch unzureichendes Penetration Testing sowie fehlenden Standards, Normen und Gesetzen für die Security von Fahrzeugen befeuert.
Die zentralen Ziele des Projekts Holistic Automotive Testing of Security, Safety, and Storage (HATS3) liegen im Aufbau eines Prüfstandes für realitätsnahe Security-Tests an Fahrzeugen im Stand und während der Fahrt sowie in der Befähigung zur Durchführung von sicherheitsrelevanten Experimenten an Hybrid- und Elektrofahrzeugen. Darüber hinaus soll eine Methode zur Erhöhung des Automatisierungsgrades im Bereich Automotive Penetration Testing entwickelt werden, um Tests zum einen standardisieren zu können und zum anderen kostengünstiger und zugleich früher, öfter und ausführlicher ausführen zu können. Ein weiteres Ziel liegt im gezielten Wissensaufbau im Themengebiet IT-Forensik für Gewährleistungs- und Versicherungsfälle von Hybrid- und Elektrofahrzeugen.
Das Projekt HATS3 wird von Professor Hans-Joachim Hof geleitet. Professor Hof leitet die Forschungsgruppe „Security in Mobility“ im CARISSMA Institute of Electric, Connected, and Secure Mobility. Die Forschungsgruppe bietet regelmäßig spannende Abschlussarbeiten an, bei Interesse kontaktieren Sie bitte Professor Hof (hof@thi.de).
Entwicklung sicherer Software für Fahrzeuge: Das Projekt MASSiF Prof. Dr. Hans-Joachim Hof
Seit Jahren steigt die Bedeutung von Software in Fahrzeugen. Während bei der Entwicklung von Software für Fahrzeugen vielfältige Methoden existieren, um die Safety sicherzustellen, wurde Security noch vor kurzem nicht mit der gleichen Intensität betrachtet, obwohl es Hacker schon 2015 gelang, ein Fahrzeug (Jeep Cherokee) aus der Ferne zu übernehmen und fernzusteuern. Ende 2021 wurde mit der ISO 21434 eine Norm verabschiedet, die einen Security Development Lifecycle für Fahrzeuge vorschreibt.
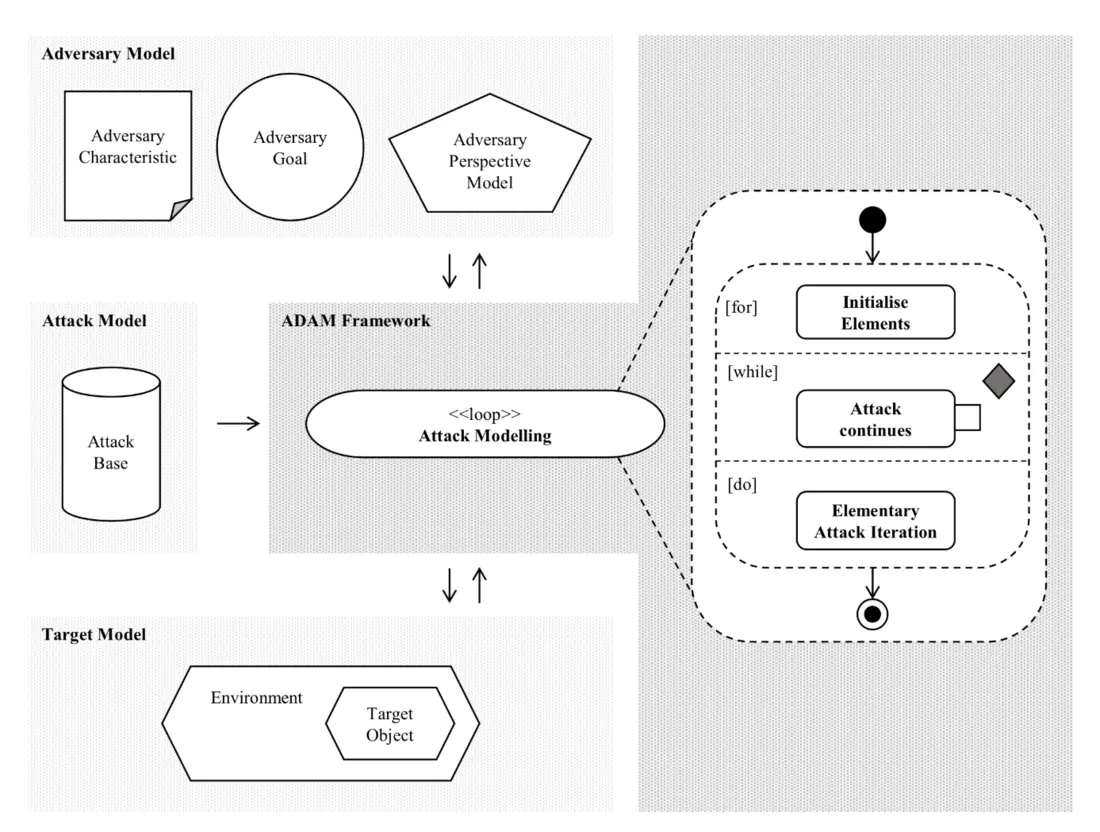
Im Projekt Modellbasierte Absicherung von Security und Safety für umfeldbasierte Fahrzeugfunktionen (MASSiF) werden bereits seit 2019 Modelle entwickelt, um automatisiert Security-Testfälle für Software in Fahrzeugen zu erzeugen. Das Testsystem erzeugt dabei Angriffe automatisiert basierend auf einer Datenbank von Angriffsbausteinen sowie basierend auf einem vorhanden Systemmodell und den Eigenschaften des Angreifers. Ein besonderer Schwerpunkt des Projekts liegt auf dem Zusammenspiel von Funktionssicherheit (Safety) und Informationssicherheit (Security) in der Entwicklung von Fahrzeugen.
Der Security-Teil des Projekts MASSiF wird von Professor Hans-Joachim Hof geleitet. Professor Hof leitet die Forschungsgruppe „Security in Mobility“ im CARISSMA Institute of Electric, Connected, and Secure Mobility. Die Forschungsgruppe bietet regelmäßig spannende Abschlussarbeiten an, bei Interesse kontaktieren Sie bitte Professor Hof (hof@thi.de).
Elektrofahrzeuge gegen Angriffe schützen: Das europäische Forschungsprojekt MARBEL Prof. Dr. Hans-Joachim Hof
Ein innovatives Batteriesystem entwickeln und damit die Mobilität von morgen mitgestalten – dieser Aufgabe stellen sich Forschende der Technischen Hochschule Ingolstadt (THI) gemeinsam mit 16 Partnern im EU-Forschungsprojekt „MARBEL“ (Manufacturing and Assembly of Modular and Reusable EV Battery for Environment-Friendly and Lightweight Mobility). Das Projekt hat zum Ziel, ein innovatives und umweltfreundliches Leichtbau-Batteriesystem mit erhöhter Energiedichte bei gleichzeitig kürzerer Ladezeit zu entwickeln. Ein besonderer Fokus liegt dabei auf dem Schutz der Batteriesysteme der Zukunft vor Angriffen durch Hacker. Die Forschungsgruppe um Prof. Dr.-Ing. Hans-Joachim Hof, trägt zur Definition der Anforderungen an die IT-Sicherheit des Systems und zur Entwicklung der Anbindung des Batteriemanagementsystems an eine Cloud bei, wobei der Schwerpunkt auf der Cybersicherheit liegt. Professor Hof: „Batteriesysteme der Zukunft stellen ein attraktives Ziel für Hacker da. In MARBLE entwickelt meine Forschungsgruppe Schutzmethoden gegen Angriffe in zukünftigen Mobilitätsszenarien“.
Professor Hof leitet die Forschungsgruppe „Security in Mobility“ im CARISSMA Institute of Electric, Connected, and Secure Mobility. Die Forschungsgruppe bietet regelmäßig spannende Abschlussarbeiten an, bei Interesse kontaktieren Sie bitte Professor Hof (hof@thi.de).
Blockchain zum Plagiatsschutz von Ersatzteilen: Das Projekt TRADE Prof. Dr. Hans-Joachim Hof

Der hohe und zunehmende Vernetzungsgrad intelligenter Fahrzeuge untereinander und mit ihrer Umgebung im Rahmen eines Automotive Cyber Systems (ACS) ermöglicht neuartige Anwendungen, geht aber auch mit neuen Bedrohungen durch Angreifer einher. Eine sichere Vernetzung und der sichere Zugang zu allen relevanten Systemkomponenten oder Daten werden folglich zu den entscheidenden Faktoren für die gesamte Fahrzeug-Infrastruktur und das Vertrauen der Fahrzeuginsassen. Dabei ist davon auszugehen, dass Stakeholder oder auch die intelligenten Fahrzeuge selbst zunehmend auf Komponenten, integrierte Software, Daten und Funktionen im gesamten Fahrzeug-Lebenszyklus zugreifen werden. Folglich benötigt eine wachsende Anzahl von Akteuren Zugriff auf ein Fahrzeug, seine Infrastruktur, seine Funktionen oder seine Daten. Da ein ACS aus Fahrzeugen verschiedener Hersteller, Infrastruktureinrichtungen und Mobilitätsdiensten verschiedener Anbieter besteht, wohnt einem ACS eine große Heterogenität inne. Erforderlich ist daher kooperative und ganzheitlicher Ansatz für die IT-Sicherheit, die in der Vision „Vollautonomes Fahren“ bisher fehlt.
Das Forschungsvorhaben TRADE (TRustworthy Autonmous Driving by DEzentralized Authen-tication and Authorization) zielt daher auf die Entwicklung einer sicheren, kooperativen und skalierbaren Sicherheitslösung ab. Eine dezentrale Identitätsmanagementlösung soll eine „globalen“ standardisierte Identitätsschicht für ein Automotive Cyber System realisieren. Dabei berücksichtigt die Lösung die Anforderungen sämtlicher Stakeholder sowie des automobilen Lebenszyklus. Die entscheidende Verwaltung des Zugangs zum Automotive Cyber System soll im entsprechenden Teil-Lebenszyklus beim jeweiligen „Owner“ verordnet werden.
Mit der Konzentration auf die Schaffung einer kooperativen Identitätsmanagementlösung, die dezentrale Authentifizierung- und Autorisierungsmechanismen beinhaltet wird die Grundlage für ein übergeordnetes Sicherheitskonzept für ACS geschaffen. Im Rahmen von TRADE wird die Funktionalität und Belastbarkeit der angestrebten Lösung am Beispiel des Anwendungsfalls „Automotive Plagiatsschutz“ basierend auf Hardware des Projektpartners ETO aufgezeigt.
Video zum Projekt auf den Webseiten des Projektpartners ETO: Link
Der Security-Teil des Projekts TRADE wird von Professor Hans-Joachim Hof geleitet. Professor Hof leitet die Forschungsgruppe „Security in Mobility“ im CARISSMA Institute of Electric, Connected, and Secure Mobility. Die Forschungsgruppe bietet regelmäßig spannende Abschlussarbeiten an, bei Interesse kontaktieren Sie bitte Professor Hof (hof@thi.de).
Human-Computer Interaction Group (HCIG) Prof. Dr. Andreas Riener

Die Human-Computer Interaction Group (HCIG) an der THI ist eine interdisziplinäre Forschungsgruppe aus Informatikern, Usability/UX-Forschern, Human Factors-Experten und Psychologen, die sich mit hypothesengetriebener, experimenteller Forschung im Bereich Human-Computer Interaction beschäftigt und einen besonderen Fokus auf Usability Forschung für intelligente Benutzerschnittstellen und Mobilität der Zukunft legt. aktuelle öffentlich- und industriefinanzierte Forschungsprojekte der Gruppe bearbeiten Forschungsfragen im Bereich automatisierter Fahrzeuge/Shuttlebusse mit Erweiterung in die dritte Dimension (urbane Luftmobilität, Drohnen). Das Spektrum des Teams deckt die gesamte Bandbreite von Pervasive Computing-Anwendungen und Ubiquitous Systems ab, z. B. multimodale Interaktion, adaptive und erklärbare (KI-) Systeme, Schätzung des Vitalzustands aus psychophysiologischen Messungen, Technikvertrauen/-akzeptanz, Absichtserkennung/Intention recognition, Situationsbewusstsein, Datenerfassung im Fahrzeug: Zuletzt hat das HCIG-Team verstärkt an Anwendungen der erweiterten, gemischten und virtuellen Realität (AR/VR/MR) gearbeitet um neuartige und effiziente Interaktionsmetaphern zu evaluieren oder Benutzerfreundlichkeit/UX von Schnittstellen zu untersuchen. Darüber hinaus haben wir ein starkes Interesse (und Spaß) an der Durchführung von Experimenten im Feld und (Fahr-)Simulatorstudien (einschließlich Wizard-of-Oz).
Forschungsagenda: "Entwicklung zukünftiger Interaktionskonzepte und intelligenter Benutzerschnittstellen, die kognitive Elemente beinhalten, um die Einzigartigkeit des Benutzers zu reflektieren".
Die Gruppe wird von Prof. Dr. Andreas Riener geleitet und wurde im Januar 2016 gegründet.
Link: https://hcig.thi.de/
Computer Vision for Intelligent Mobility Systems Prof. Dr. Torsten Schön
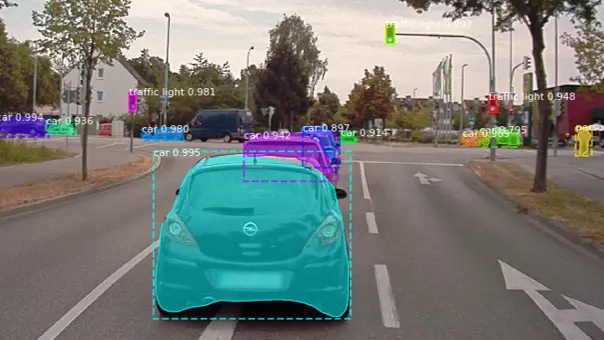
Die Forschungsgruppe Computer Vision for Intelligent Mobility Systems befasst sich mit Deep Learning Methoden zur Analyse und Generierung von Bilddaten. Dabei werden Daten aus unterschiedlichen bildgebenden Sensoren im zwei- sowie dreidimensionalen Raum verarbeitet. Ziel der Forschungsgruppe ist die Entwicklung einer super-human Wahrnehmung für automatisierte Fahr-zeuge, Fluggeräte, Schienenfahrzeuge, und sonstige Fortbewegungsmittel sowie die Analyse von Bilddaten aus Infrastruktursensoren zur Verkehrsüberwachung. Um dieses Ziel zu erreichen, forscht die Gruppe an neuartigen Deep Learning Architekturen und deren Anwendung auf Mobilitätssysteme. Ein wichtiger Baustein davon ist die zuverlässige Erkennung von Objekten sowie die vollständige semantische Segmentierung der Umgebung auch unter schwierigen Bedingungen wie starker Regen oder Schneefall. Hierfür werden meiste mehrere Sensormodalitäten verwendet, welche mittels Deep Fusion zusammengeführt werden können. Um die Vielzahl an Trainingsdaten zu erzeugen, befasst sich die Forschungsgruppe weiter mit der Simulation von Bilddaten und wie diese mittels Transfer Learning oder Generative Adversarial Networks so umgewandelt werden können, dass sie wie reale Daten erscheinen.
Neben den Bestrebungen im Mobilitätsbereich engagiert sich die Forschungsgruppe unter der Leitung von Prof. Dr. Torsten Schön für den Einsatz von Computer Vision für verbesserten Umweltschutz und mehr Nachhaltigkeit.